Overview
simple test to get a first feeling about something POV related ;-)


Contents
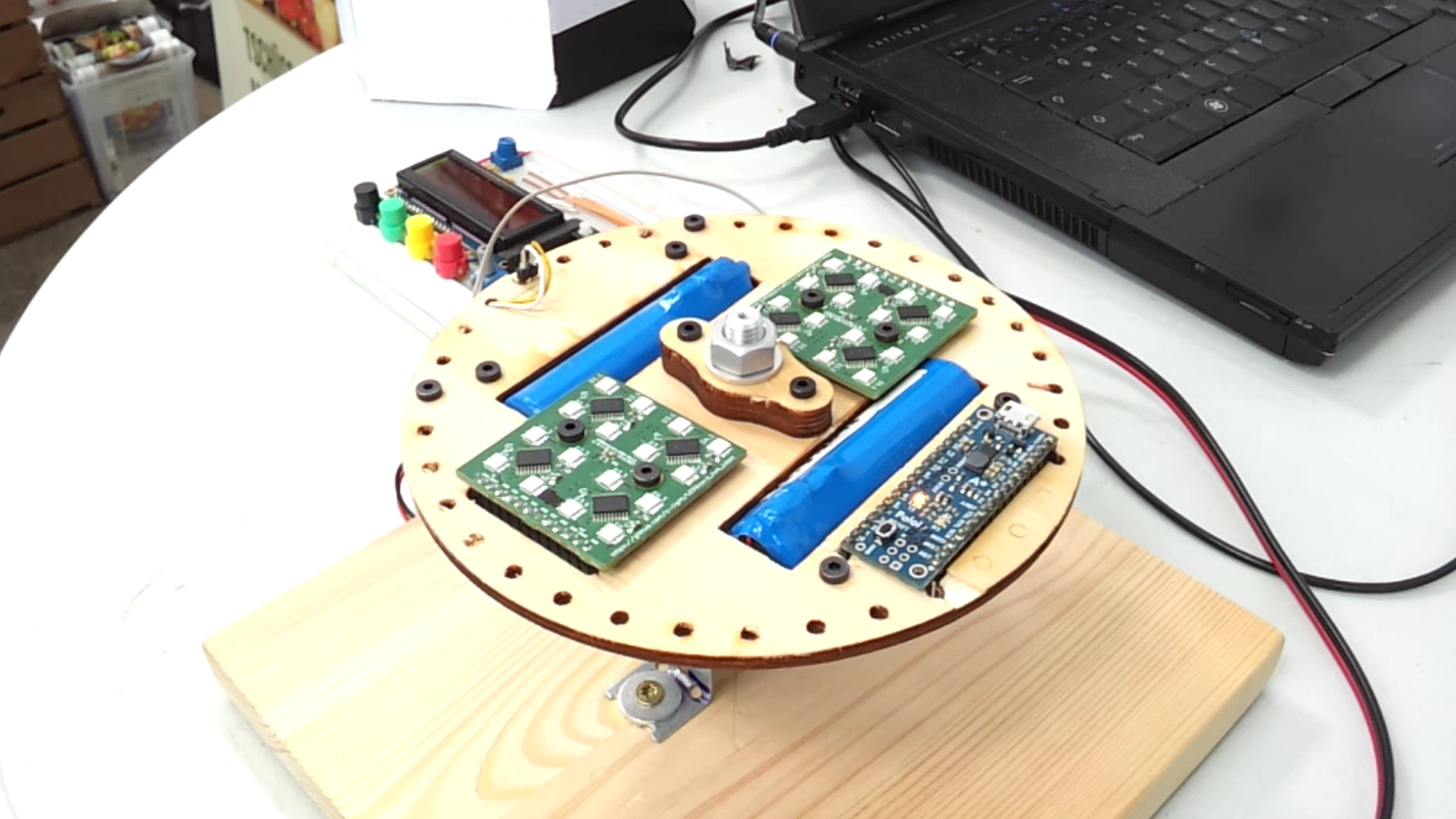
HW
- Motor Controller
- Arduino Micro for Motor Speed Controller (with display and some buttons - for details see Leonardo_wLCD_protobase)
- IRLZ34N N-Channel Logic Level Power Mosfet
- MBR1660 as freewheeling diode
- POV Controller
- Pololu A-Star Mini LV as POV Controller
- LEDBoard_4x4_16bit for output
- 2x SFH4550 IR-LED 850nm 3° (one as sender and one as receiver)
Software
SW_motordriver_wTacho
based on Leonardo_wLCD_protobase
added IRLZ34N N-Channel Logic Level Power Mosfet and fast Diode for driving the Motor.
shows the current RPS (revolutions per second) on the LCD.
SW_simple_pov_TLC5971
based on LEDBoard_4x4_16bit_HWTest.
implements basics to generate some very simple test-patterns for POV.
uses the ulrichstern/Tlc59711 library.
with my changes in idx lookup branch
the setting of the Color information per LED tlc.setRGB(idx, r, g, b); call is way faster:
- orig ~49us
- lookup_idx ~9us
but currently this branch relies on c++14 features that require the arduino beta version..
for now you can use arduino-PR-beta1.9-BUILD-71 and
enable c++14 support in /home/$USER/.arduino15/packages/arduino/hardware/avr/1.6.20/platform.txt:
change -std=gnu++11
to -std=gnu++14 in the line starting with compiler.cpp.flags=
TODO
- try some more test patterns